Typical Tasks for Landing Pad Construction
Some or all of these may need to be performed. Robotics are being developed for these tasks.
- Locate a good site
- Remove boulders
- Grade the site with a bulldozer
- Compact the regolith to prepare it for sintering
- Sinter the center of the landing site, or lay and grout pavers
- Rake rocks and gravel from a nearby tract then spread the gravel around the landing pad
- Spray polymer on the surrounding terrain to reduce dust transport
- Build berms with a bulldozer
- Erect blast fences, lighting poles, communications and navigation antennas if required
- Bulldoze and stabilize the soil for a road
Lunar Bulldozers
The KSC Swamp Works (members of our team) developed a low-mass, high-strength lunar bulldozer blade along with a QuickAttach mechanism so the NASA JSC Chariot Rover could autonomously and quickly pick up and pre-load the attachment of the blade then immediately work with it. This blade has been used in Desert-RATS field tests.


Sintering Robots
The KSC Swamp Works developed robotic technology for sintering lunar regolith and mounted it on a rover for field testing.

Paver-Laying Robots
Honeybee Robotics build a robotic arm that layed interlocking pavers, which KSC Swamp Works sintered from lunar soil simulant.

Automated Additive Construction (AAC)
The KSC Swamp Works has developed a large robotic arm with attachment that 3D prints structures from lunar soil simulant. This type of system could be used to 3D print walls around a landing site as blast barriers.
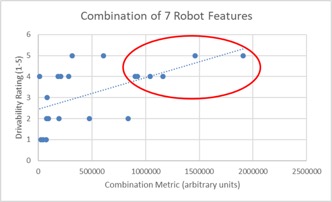
Robotics Competitions
Members of CLASS participate in the annual NASA Robotic Mining Competition, including Rob Mueller, its co-founder and head judge. Through this competition over 450 designs for lunar and Martian robots have been evaluated. We have collected and analyzed data on the robots to answer questions such as, why do some robot designs avoid getting stuck in the lunar-like regolith, which other robots have difficulty driving? We have discovered that no single parameter of the robot correlates to successful driving. It is not until we analyzed the combinations of seven or more parameters that we began to see correlations. This has enabled our team members to develop world-leading expertise in designing robots to work in lunar regolith.

Planetary Surface Construction Tasks
Tasks include the following (Source: “Robotic Systems for Space Mining and Planetary Surface Construction” by Rob Mueller)
- Launch/Landing Pads
- Beacon/Navigation Aids
- Lighting Systems
- Communications Antenna Towers
- Blast Protection Berms
- Perimeter Pad Access & Utility Roads
- Spacecraft Refueling Infrastructure
- Power Systems
- Radiation, Thermal & Micro Meteorite Shielding
- Electrical Cable/ Utilities Trenches
- Foundations / Leveling
- Trenches for Habitat & Element Burial
- Regolith Shielding on Roof over Trenches
- Equipment Shelters
- Maintenance Hangars
- Dust free zones
- Thermal Wadi’sfor night time
- Regolith Mining for O2 Production
- H2O Ice/Regolith Mining from Shadowed Craters
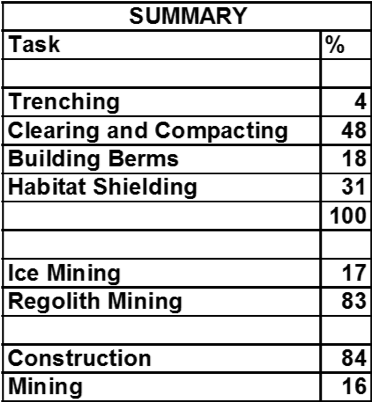
The tasks were evaluated by Rob Mueller and Bob King for the number of metric tons of regolith that must be moved to accomplish each, shown in the bar graph below (Space Resources Roundtable, SRR-IX, Oct. 2007)

The NASA Technology Roadmap (NASA, Ambrose, Wilcox, et al., 2010) lists the top robotics technical challenges:
- Object Recognition and Pose Estimation
- Fusing vision, tactile and force control for manipulation
- Achieving human-like performance for piloting vehicles
- Access to extreme terrain in zero, micro and reduced gravity
- Grappling and anchoring to asteroids and non cooperating objects
- Exceeding human-like dexterous manipulation
- Full immersion, telepresencewithhapticand multi modal sensor feedback
- Understanding and expressing intent between humans and robots
- Verification of Autonomous Systems
- Supervised autonomy of force/contact tasks across time delay
- Rendezvous, proximity operations and docking in extreme conditions
- Mobile manipulation that is safe for working with and near humans